
FIG 00 — Matte black PLA nozzle — chamfered industrial topology
Adaptive Vacuum Nozzle
Designed for the condo. Engineered for the 600W motor behind it.
High-velocity vacuum attachment for cleaning the Bambu Lab A1 electronics bay, with a passive bypass system preventing motor overheating under blockage.
Problem
Cleaning the electronics bay of consumer 3D printers in high-density condo environments presents unique contamination challenges — dust, debris, and biological matter accumulate in narrow geometries. Standard vacuum nozzles block easily, causing sudden airflow restriction that can overheat or stall a 600 W vacuum motor.
Solution
Designed a custom nozzle with a passive airflow bypass that maintains intake flow even if the primary opening is fully obstructed. The Venturi geometry accelerates tip velocity while the bypass array caps motor impedance, decoupling cleaning performance from blockage risk. Airflow was validated in SimScale CFD — velocity streamlines confirmed tip flow exceeding 38 m/s. The part was oriented to minimise internal supports for FDM printing
Key Contributions
- →Passive bypass architecture preventing vacuum motor stall under blockage
- →CFD-validated pressure recovery and laminar flow topology
- →Venturi-accelerated tip velocity (> 30 m/s) for debris entrainment
- →DFAM orientation minimising internal support material
Results & Metrics
Impact
Gallery
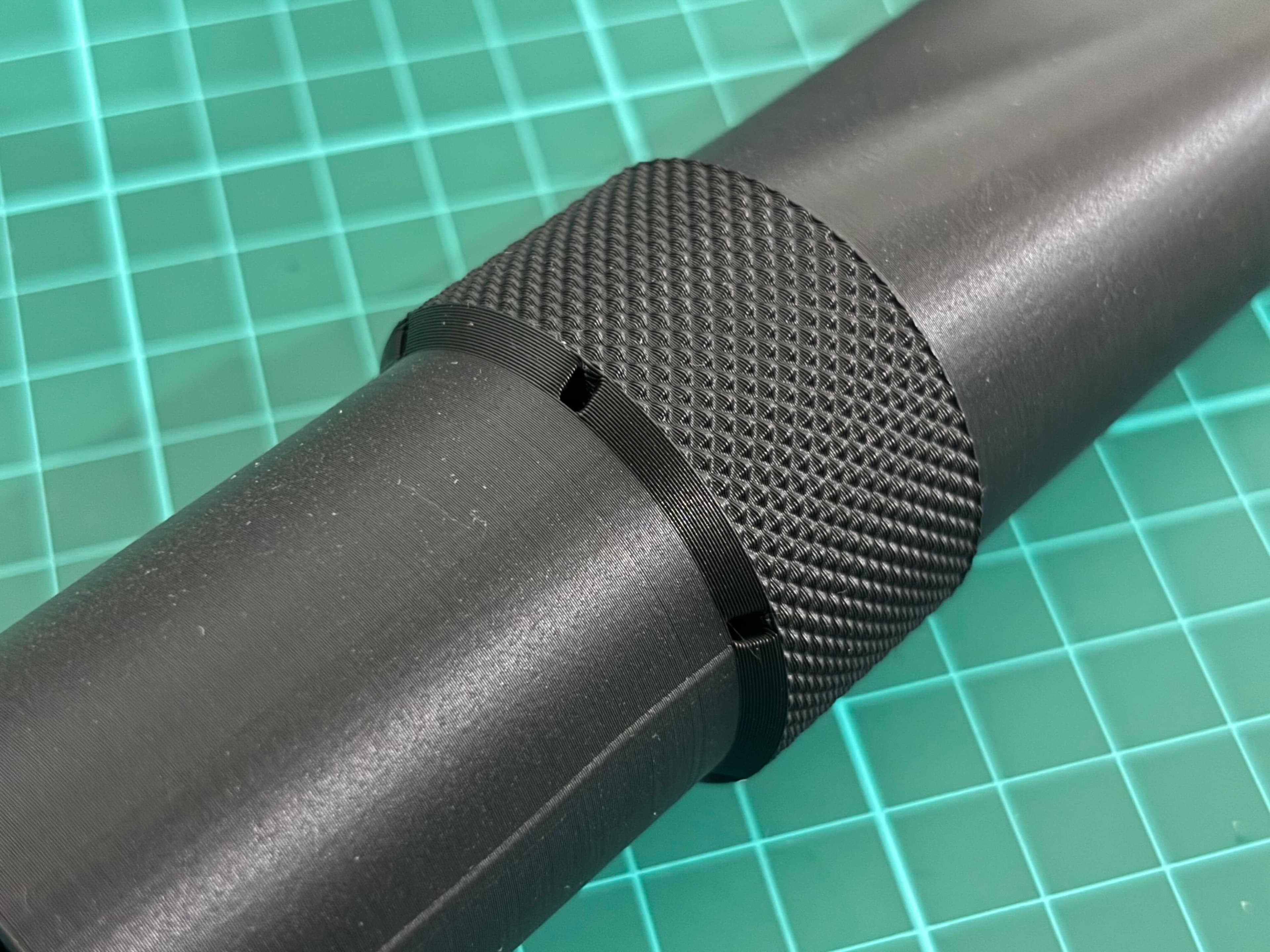
FIG 05Passive bypass array (knurled section) decoupling cooling from suction

FIG 07Final fabricated nozzle

FIG 02Clearance check inside the Y-axis electronics bay (8 mm tip)
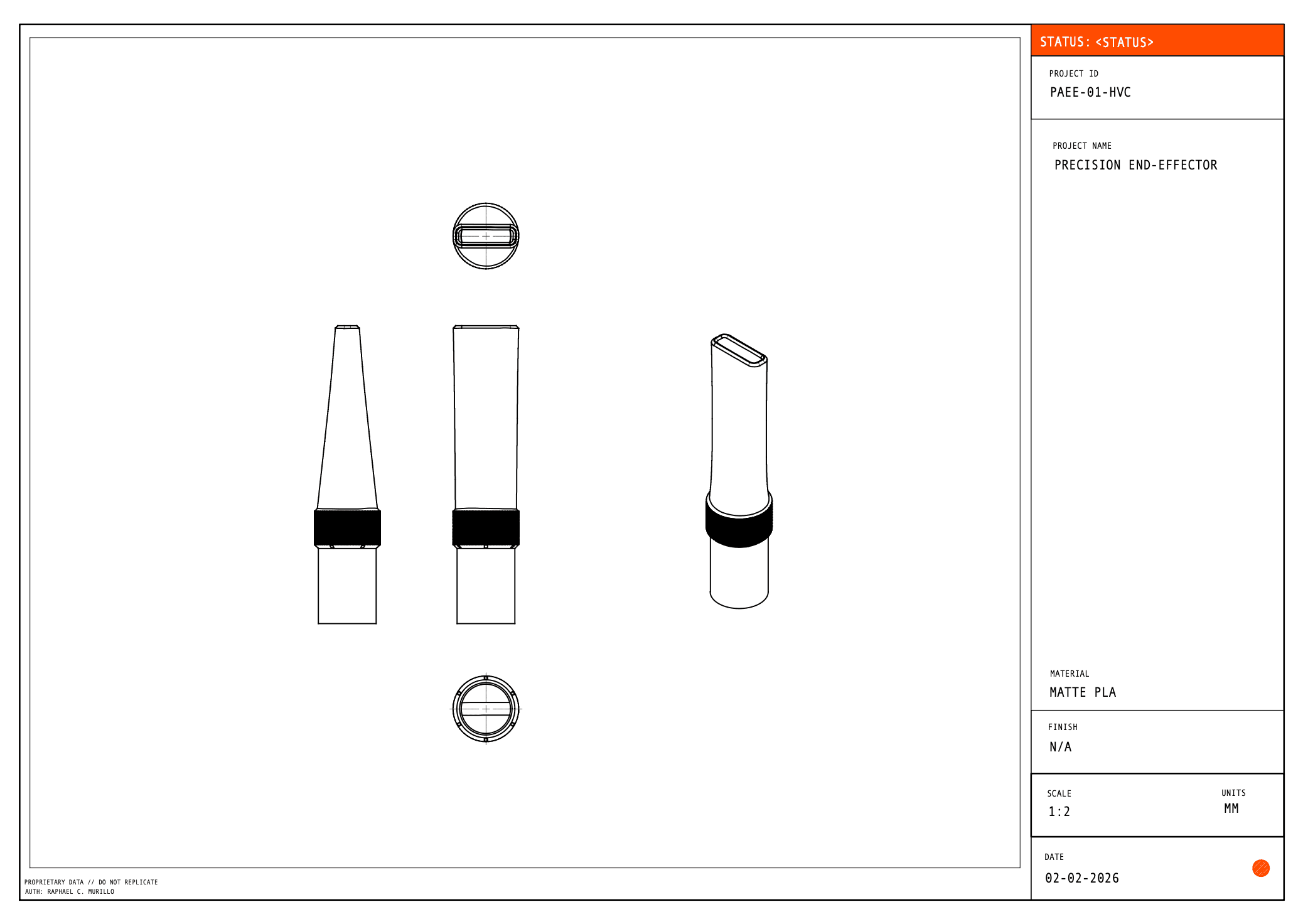
FIG 06Orthographic projections

FIG 03CFD velocity streamlines — tip velocity confirmed > 38 m/s
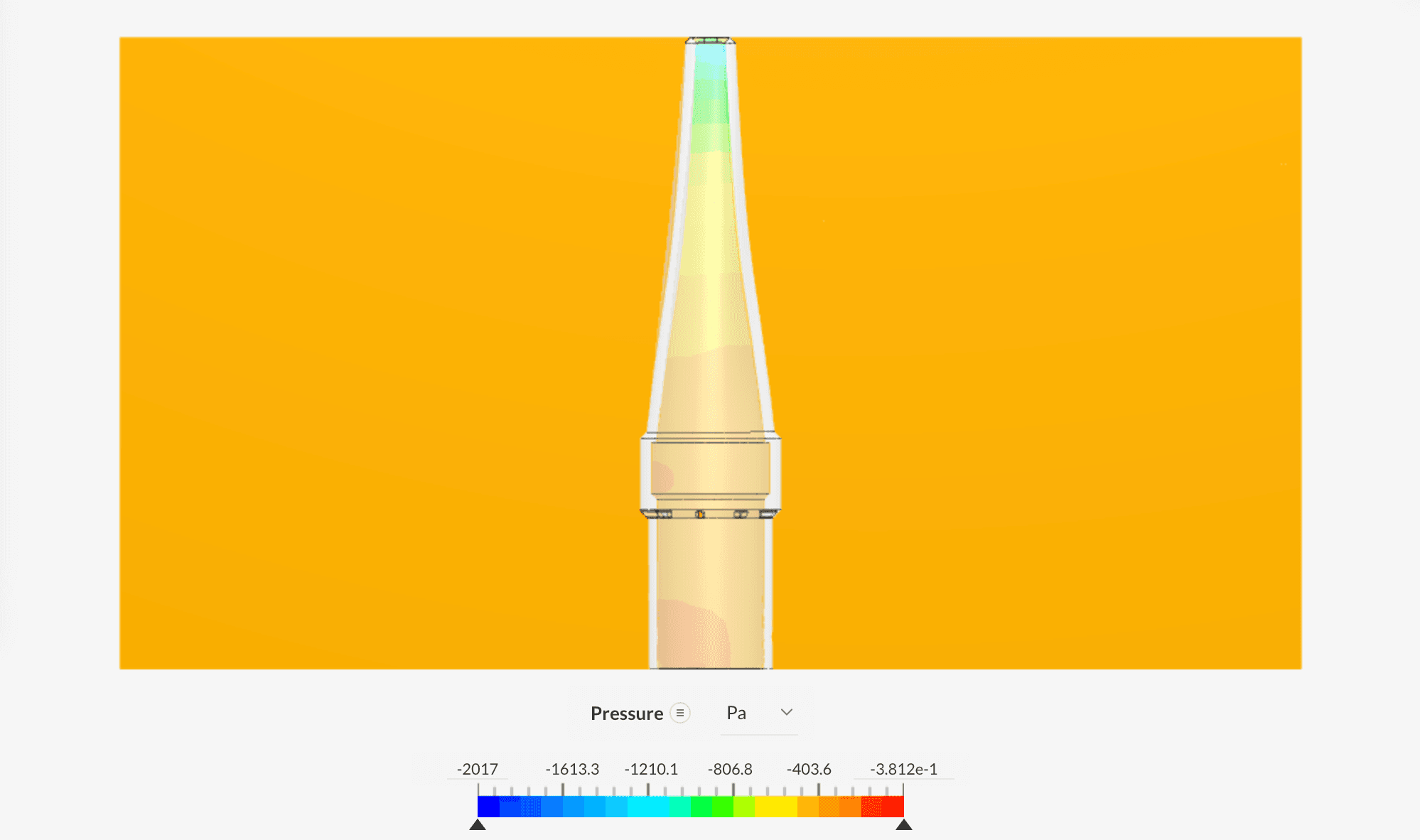
FIG 04Pressure gradient simulation — -2 kPa drop confirms efficient recovery